Presentation on
Multi-Threading & POSIX Thread APIs
By DIPAK K. SINGH
dipak123@gmail.com /
dipak123@yahoo.com
Version 1.0 dated 18 January 2013.
Multi-Threading & POSIX Thread APIs
By DIPAK K. SINGH
dipak123@gmail.com /
dipak123@yahoo.com
Version 1.0 dated 18 January 2013.
Navigation
Use mouse click, keyboard and swipe ( in touch device) to navigate.
| Arrow keys and spacebar | To navigate through slides |
| Mouse click on navigate icon shown on right bottom | |
| Swipe left or right on touch device | |
| Escape key | To show/hide thumbnail of slides |
| Enter key | To select highlighted slide in thumbnail mode |
| Mouse click on bottom bar | To select slide as per position in bar |
Slides have been arranged horizontally. Use left and right to navigate.
Few slides have additional slides arranged vertically.
Use up and down to navigate them. Up/Down arrow of navigate icon gets highlighted for those slides.
Contents
A. Concepts of MultiThreading
| B. POSIX Thread
|
Section A
Multi-Threading
Multi-Threading
Why Multi-Threading ?
Sequencial applications, e.g. execution of one instruction after another, is very natural and easy to understand. Then, why to go for multi-threading? Few reasons are
- Increase Application's Responsiveness
Example: A GUI application will keep on interecting with users while data is being fetched from backend, say web in a browser .
- Better structuring of application
Example: A file server in which individual requests are served by separate threads.
- Take advantage of multiple CPUs and Cores
Example: Image rendering software can use multiple CPUs/Cores on different part of image at the same time to get result quickly.
Life Cycle of Thread
Life cycle of a thread is very similar to sequencial application (single threaded application). Fundamental states of a thread is same as single threaded application.
| Created/New | First state of a thread. A thread just created. It will start running as per scheduling policy. |
| Running | Thread is running. |
| Ready | Ready to run when microprocessor becomes available. |
| Waiting | Thread is waiting for a resource such as data from file. |
| Suspend | Thread has been suspended, say by debugger. |
| Exit | Thread exits after performing its job or terminated prematurely. Last state of a thread. |
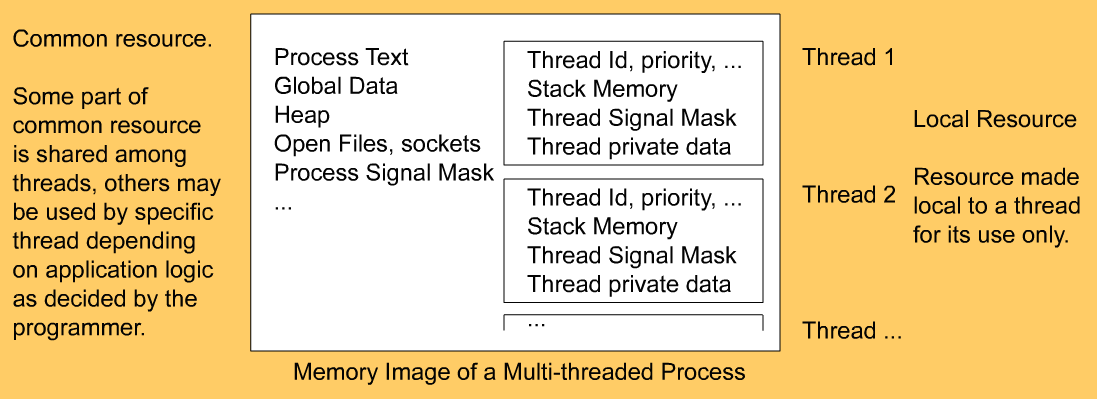
Resource Sharing
All threads of an application see same memory image. Therefore, context switch between threads of the application is very fast. All other resources of application such as open file, socket etc. are also visible to all threads.
Though, all threads see entire memory of the application but some memory is made local to a thread in cooperative manner to enable independent stream of execution. Such data are Thread Id, Stack, Signal mask etc.
Stack Memory
Memory image of application is divided into four segments - Text, Data, Heap and Stack. |
In multi-threaded application, separate stacks are created for each thread. |
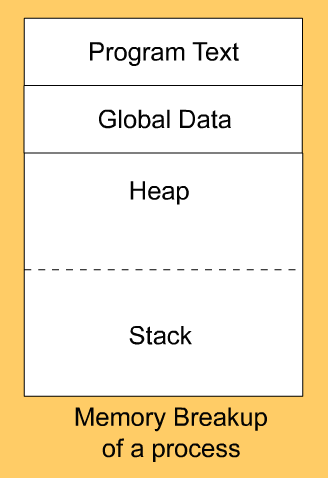
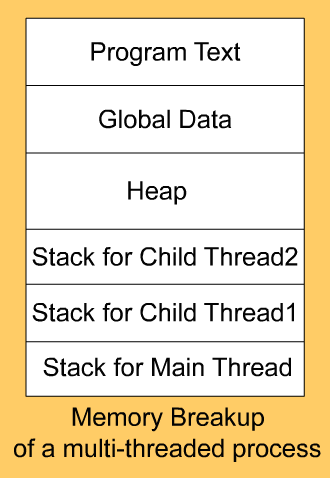
Why separate stack? Answer below ( press spacebar or down arrow key ).
Stack Memory - Why separate stack?
Frame for each function call is pushed on stack memory and popped when function returns. If multiple threads push frame on same stack, popping would become dependent of other threads. Therefore, separate stacks are preferred.
Synchronisation
Synchronisation enables multiple thread to coordinate their activities. Synchronisation is required for
1. Data access and
2. Thread synchronisation
|
pthread | ||
|---|---|---|---|
| 1. | Mutex Lock | Mutual exclusive lock. | Yes |
| 2. | Read Write Lock | Allows multiple concurrent reads of an exclusive write. | Yes |
| 3. | Conditional variable | Thread goes into sleep if condition is false. It is awaken by another thread when condition becomes true. | Yes |
| 4. | Synchronised object | Only one thread can access the object. Usually implemented by language. | No |
Synchronisation
|
pthread | ||
|---|---|---|---|
| 1. | Join | A thread waits for another thread to terminate. Then moves ahead. It is similar to UNIX wait() function which is used by parent process to wait() for child process to terminate. | Yes |
| 2. | Barrier | All threads wait for other threads at the barrier point. Only when all threads arrive at the barrier point, then they all move ahead. Barrier is a point defined in the source code. | Yes |
pthread part of presentation contains examples of mutex ( synchronised access of data using API pthread_mutex) and join ( thread joining using API pthread_join).
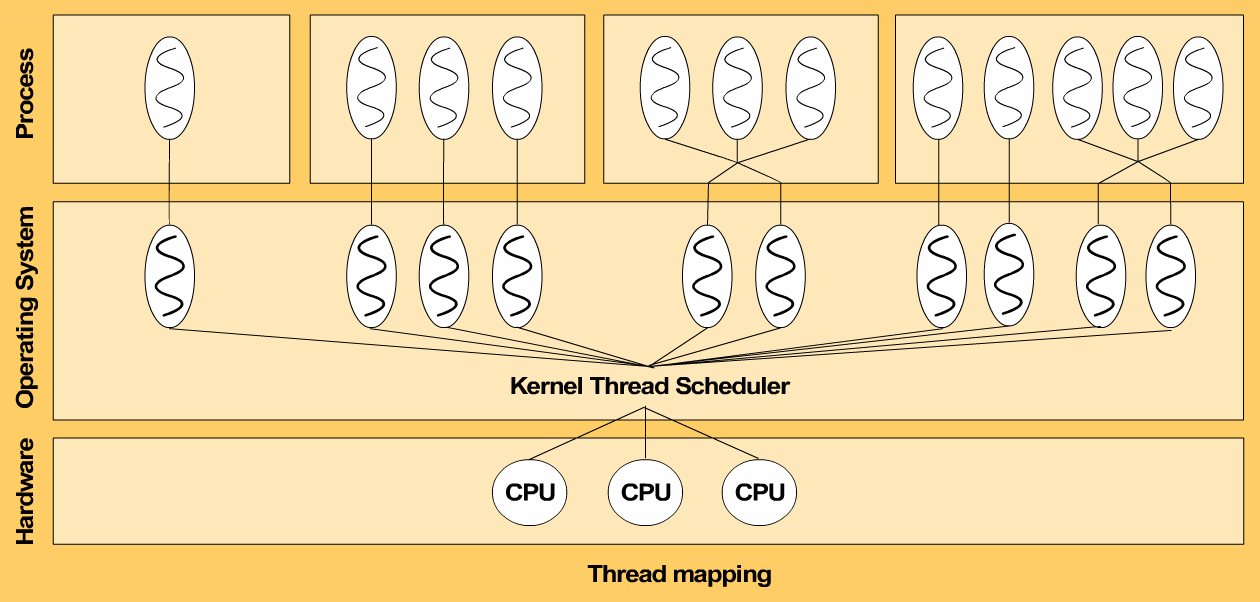
Operating System Aware Threads
Programmers creates threads in an application. Threads can be implemented in library such that operating system is unaware of threads. In such a situation, multiple cores/CPUs cannot be used by the application.
Trend now a days is to map programmers' thread to kernel level threads.
Operating system allocates one or more kernel threads to an application depending on active threads created by the programmer.
Kernel level threads are scheduled on CPUs/cores to run the application. Parallel processing is possible in this model.
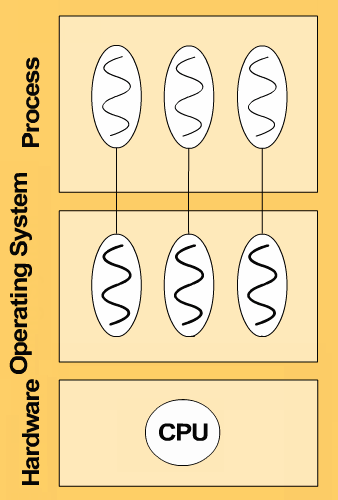
Operating System Aware Threads - Mapping
Mapping between Programmer's Thread and Kernel Level Threads can take place in 1x1 , MxN or any other manner. 1x1 mapping is the most common as shown in first and second processes from left in the diagram below..
Section B
POSIX Thread APIs
POSIX Thread APIs
POSIX Thread
POSIX Thread, commonly known as pthread, is a very popular C library which provides thread support to programming languages C and C++.
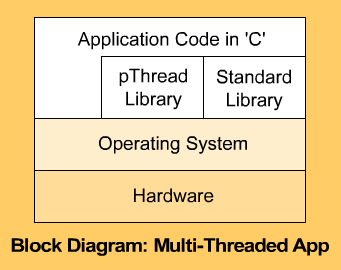
C++ programmers prefer boost::thread which is mainly a C++ wrapper over pthreads.
C++11 supports thread as part of standard library (std::thread). C++11 thread is gaining popularity but still quite less in installed base compared to pthread being very new (released in 2011). Boost and C++11 are out of scope of this presentation.
POSIX Thread
pthread refers to thread section of POSIX ( Portable Operating System Interface) Specification by http://opengroup.org . It has been accepted by IEEE as 1003.1 2013 specification. pthread does not include implementation. Platform vendors and third party are free to implement pthread specification.
pthread is an C library code.
This part of presentation for pthread covers commonly used APIs and important concepts only. You will be able to write multi-threaded application by the end of this presentation but refer to additional study materials to get expertise in pthread.
Thread Start and End
A thread is created by pthread_create() . A function is associated to pthread_create() to act as start routine (starting point) for the thread.
int pthread_create(pthread_t *thread,
const pthread_attr_t *attr,
void *(*start_routine)(void*),
void *arg);
Thread ends when it returns from start_routine, calls pthread_exit() to terminate itself or cancelled by other thread.
A thread can wait for another thread to end by calling pthread_join().

Thread Termination
A thread terminates in any one of three ways
| Exit status of thread | ||
|---|---|---|
| 1 | pthread_exit() is called | argument to pthread_exit() |
| 2 | returns from start routine | return value |
| 3 | thread cancellation | PTHREAD_CANCELLED |
When process starts, a thread is automatically created for main(). This thread is called Main Thread. Main thread can also be terminated by pthread_exit() or cancelled. However, return from main() terminates process not main thread.
Exit status of thread can be captured by pthread_join(pthread_t thread, void **exit_status_ptr).
It is possible to register cleanup functions to thread. Those registered functions are called as part of thread termination.
Process Termination
A multi-threaded process terminates in any one of four ways
| Exit status of process | ||
|---|---|---|
| 1 | Return from main() | Return value from main() |
| 2 | exit() called from any thread | argument to exit() |
| 3 | All threads including main terminates | Always zero |
| 4 | Killed by user or operating system. Examples kill -9 pid, segv etc. This is a case of abnormal termination |
Not applicable |
Point 3 is a case added by pthread. Other three cases are pthread independent and applicable to both sequential and multi-threaded application in exactly same manner.
Thread Cancellation
A thread can be cancelled by another thread of the same process. The recipient thread is cancellation immediately or at Cancellation Point as per setup.
int pthread_setcancelstate(int state, int *oldstate);
Values of state are:
PTHREAD_CANCEL_DEFERRED ( cancel at cancellation point) and
PTHREAD_CANCEL_ASYNCHRONOUS ( cancel immediately).
Cancellation can be disabled too.
int pthread_setcanceltype(int type, int *oldtype);
Values of type are:
PTHREAD_CANCEL_DISABLE and
PTHREAD_CANCEL_ENABLE .
In PTHREAD_CANCEL_DISABLE mode, cancellation request received is deferred till cancelability is enabled.
Thread Cancellation Points
Cancellation Points are points in code where cancellation can take place. They are:
- Some of standard library calls, not all. Example is fopen()
- Some of pthread library calls, not all. Example is pthread_join()
- Explicit call of pthread_cancell()
Cancellation point ensures that thread does not get abruptly terminated. When a thread is cancelled, all regular cleanups are performed as if thread terminated normally.
Thread Specific Data
Thread specific data (TSD) is a global data for the thread. Values changed in TSD by one thread does not impact TSD of other threads.
How to use?
A variable of pthread data type pthread_key_t is created. This variable is a regular data type which must be visible to all threads. TSD is associated to variable of pthread_key_t . Look at the example below.
pthread_key_t thSpecificGlobal;
void setValue(char *str) {
// Each thread associates its value
pthread_set_specific(thSpecificGlobal, str);
}
char* getValue() {
// Value saved by this thread is returned.
return (char*)pthread_get_specific(thSpecificGlobal);
} Usually variable of pthread_key_t is global but not mandatory.
pthread mutex
pthread mutex can be used for synchronised access of shared data. Only one thread operates on protected data at a time.
Initialisation of mutex
pthread_mutex_t mutex_obj;
int main() {
pthread_mutex_init(&mutex_obj); // One time init
... // use mutex
pthread_mutex_destroy(&mutex_obj); // Destroy at end
}
Use of mutex for synchronised access
int update_record() {
pthread_mutex_lock(&mutex_obj); // Request mutex
/* Only one threads runs at a time
* in this part of the code */
pthread_mutex_unlock(&mutex_obj); // Release mutex
}
Compilation & Linking
Compiler: Since pthread is a library, any C/C++ compiler will work.
Library: pthread library comes preinstalled on almost all UNIX systems, Mac OS and other operating systems. If missing, you will have to find it and install.
Compilation:
cc simple_example.c -lpthread
Note need of pthread library in command line -lpthread .
Above step has been verified on Linux 2.6, Solaris 8, AIX 5.3 and Mac OS 10.9.4 .
Example Code
/*
* Simple Thread Example
* It just creates two threads. Prints messages then exit.
*
* APIs used are:
* 1. pthread_create
* 2. pthread_attr_init
* 3. pthread_join
*/
#include
#include
#include
#include
#define RETVAL_CHECK(retval,func_name) if(retval) {printf("Function '%s' returned error value %d\n", func_name, retval);}
/*
* Start routine for the thread.
* This is thread's starting point. Like main() for process.
*/
void *thread_start_routine( void *ptr )
{
char *threadName = (char*)ptr;
printf("%-15s: Called\n", threadName);
sleep(10);
printf("%-15s: Completed\n", threadName);
return 0;
}
/*
* Main Function
*/
int main()
{
pthread_t thread1, thread2;
pthread_attr_t tattr;
int retval;
/* Create Thread with default behavior - null attributes object used */
retval = pthread_create(&thread1, NULL, thread_start_routine, (void*) "First Thread");
RETVAL_CHECK(retval,"pthread_create");
/* Initialized by default thread attributes */
retval = pthread_attr_init(&tattr);
RETVAL_CHECK(retval,"pthread_attr_init");
/* Create Thread with default behavior - attributes object with default setup */
retval = pthread_create(&thread2, &tattr, thread_start_routine, (void*) "Second Thread");
RETVAL_CHECK(retval,"pthread_create");
pthread_join( thread1, NULL);
sleep(2);
pthread_join( thread2, NULL);
return 0;
}
Another example max_number_in_array.c
Linux top
Kernel level threads created for the multi-threaded process can be seen in Linux. Specify option '-L' to UNIX command 'top' .
$ ps -Lf -u dipak
UID PID PPID LWP C NLWP STIME TTY CMD
dipak 190 189 190 0 1 Apr20 pts/5 /bin/bash
dipak 757 615 757 0 3 13:36 pts/7 simple_example
dipak 757 615 758 0 3 13:36 pts/7 simple_example
dipak 757 615 759 0 3 13:36 pts/7 simple_example
dipak 760 477 760 1 1 13:36 pts/4 ps -fL -u
$
For process 757, three kernel level threads were created . Ids are 757, 758 and 759 shown in LWP column.
LWP stands for light weight process which can be considered exactly similar to kernel level thread in context of multi-threaded applications.
LWP details are available at /proc<LWP Id>/ .
Debugging using GNU gdb
Debugger must be thread aware. GNU gdb is thread aware. gdb attaches to process as usually but focusses on any one of the thread at a time.
Display all threads of the process
(gdb) info threads
2 process 350 thread 0x20f 0x00001c81 ...
* 1 process 350 local thread 0xf03 main () at simple_example.c:84
(gdb)
Thread in focus has been marked by sign * . To change focus to other thread, call
(gdb) thread 2
[Switching to thread 2 ( process 350 thread 0x20f 0x00001c81)]
0x00001c81 in thread_start_routine ... simple_example.c:179
(gdb)
View code, stepin, next etc. operations are perform on thread in focus.
Debugging using GNU gdb
gdb stops and starts process, not thread. Even in case of next, process starts then stops when next line is reached by the thread in focus. Process start and stop means all threads will be started and stopped.
Thread id ( 1, 2) printed by gdb is an unique id given to thread by gdb for tracking threads easily.
References
The Open Group Base Specifications Issue 7 / IEEE Std 1003.1, 2013 Edition at pubs.opengroup.org . Login required.
Multithreaded Programming Guide. Primarily for Solaris but useful on others platforms too. It covers both pthread and native Solaris thread docs.oracle.com .
PThreads Primer - A Guide to Multithreaded Programmig. PDF book by Bil Lewis & Daniel J. Berg. Published long back but still quite useful. POSIXMultithreadProgrammingPrimer.pdf
Tutorial on Java - Multithreading www.tutorialspoint.com .
C++11 Concurrency, Part 1 www.youtube.com/watch?v=80ifzK3b8QQ ( 1st of series of 9 videos. 20-30 minutes each video ).